


Polígonos 2D
Cabecera
#include <geom2d/pol2d.h>
Funciones
| Pol2D* | pol2d_create (...) |
| Pol2D* | pol2d_convex_hull (...) |
| Pol2D* | pol2d_copy (...) |
| void | pol2d_destroy (...) |
| void | pol2d_transform (...) |
| const V2D* | pol2d_points (...) |
| uint32_t | pol2d_n (...) |
| real | pol2d_area (...) |
| Box2D | pol2d_box (...) |
| bool_t | pol2d_ccw (...) |
| bool_t | pol2d_convex (...) |
| V2D | pol2d_centroid (...) |
| V2D | pol2d_visual_center (...) |
| ArrSt(Tri2Df)* | pol2d_triangles (...) |
| ArrSt(Pol2Df)* | pol2d_convex_partition (...) |
Los polígonos son figuras ampliamente versátiles, ya que nos permiten definir regiones arbitrarias delimitadas por segmentos rectilíneos. Geom2D soporta los llamados polígonos simples, que son aquellos cuyos lados no pueden intersectar entre sí.
- Utiliza pol2d_createf para crear un polígono a partir del recorrido que forman sus vértices.
- Utiliza pol2d_ccwf para obtener el sentido de giro del recorrido. Ver Ángulos CW y CCW.
- Utiliza pol2d_transformf para aplicar una transformación al polígono.
- Utiliza pol2d_areaf para obtener el área.
- Utiliza pol2d_boxf para obtener los límites del polígono.
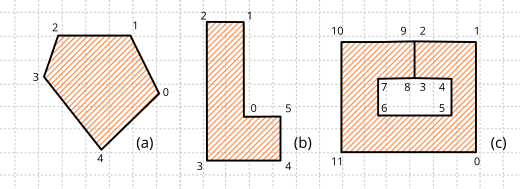
Podemos clasificar a los polígonos en tres grandes grupos (Figura 1):
- Convexos: Los más "deseados" desde el punto de vista de la simplicidad de cálculo. Son aquellos donde cualquier segmento que una dos puntos interiores, queda totalmente dentro del polígono.
- Cóncavos: O no convexos. Lo opuesto a lo anterior. Es aquel que tiene un ángulo interior de más de 180 grados.
- Débiles (Weakly): Es aquel que presenta agujeros por medio de segmentos "de corte" donde dos vértices son duplicados para permitir el acceso y regreso de cada agujero. Es una forma sencilla de vaciar el interior de regiones sin que sean necesarios múltiples ciclos. El cálculo de áreas y colisiones tendrán en cuenta estas cavidades.
1. Centro del polígono
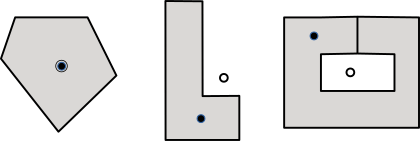
Es complicado definir un punto central en una figura tan irregular como puede llegar a ser un polígono. Normalmente interpretaremos como tal el centroide o centro de masas pero, en casos no cónvexos, este punto puede localizarse en el exterior del polígono. En tareas de etiquetado se hace necesario disponer de un punto representativo que esté dentro de la figura. Consideramos como centro visual a aquel punto dentro del polígono situado a una distancia máxima de cualquier borde (Figura 2). En polígonos convexos coincidirá con el centroide.
- Utiliza pol2d_centroidf para obtener el centroide del polígono.
- Utiliza pol2d_visual_centerf para obtener el centro visual del polígono. Implementa una adaptación del algoritmo polylabel del proyecto MapBox.
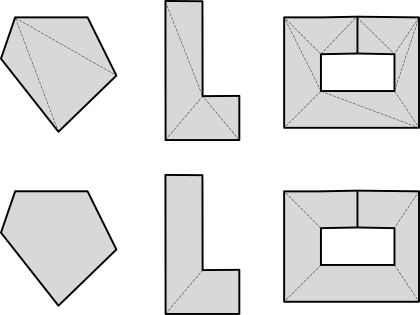
2. Descomposición de polígonos
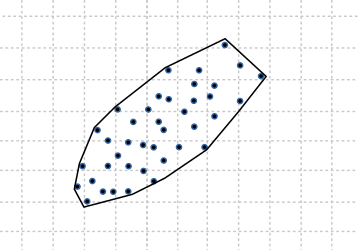
Determinados cálculos o tareas de renderizado se pueden optimizar considerablemente si reducimos la complejidad de la geometría a tratar. Descomponer un polígono no es más que obtener una lista de polígonos más simples cuya unión equivale a la figura original (Figura 3). Como operación inversa, tendríamos el cálculo de la envoltura convexa Convex Hull, que es la obtención del polígono convexo que encierra a un conjunto de puntos arbitrarios (Figura 4).
- Utiliza pol2d_trianglesf para obtener una lista de los triángulos que forman el polígono.
- Utiliza pol2d_convex_partitionf para obtener una lista polígonos convexos equivalentes al polígono.
- Utiliza pol2d_convex_hullf para crear un polígono convexo que "envuelva" a un conjunto de puntos.
pol2d_create ()
Crea un nuevo polígono.
Pol2Df* pol2d_createf(const V2Df *points, const uint32_t n); Pol2Dd* pol2d_created(const V2Dd *points, const uint32_t n); Pol2D* Pol2D::create(const V2D *points, const uint32_t n);
| points | Lista de puntos que forman el polígono. |
| n | Número de puntos. |
Retorna
El polígono creado.
pol2d_convex_hull ()
Crea el polígono convexo mínimo que envuelve a un conjunto de puntos (Convex Hull).
Pol2Df* pol2d_convex_hullf(const V2Df *points, const uint32_t n); Pol2Dd* pol2d_convex_hulld(const V2Dd *points, const uint32_t n); Pol2D* Pol2D::convex_hull(const V2D *points, const uint32_t n);
| points | Lista de puntos. |
| n | Número de puntos. |
Retorna
El polígono.
pol2d_copy ()
Crea una copia del polígono.
Pol2Df* pol2d_copyf(const Pol2Df *pol); Pol2Dd* pol2d_copyd(const Pol2Dd *pol); Pol2D* Pol2D::copy(const Pol2D *pol);
| pol | El polígono original. |
Retorna
El polígono copiado.
pol2d_destroy ()
Destruye el polígono.
void pol2d_destroyf(Pol2Df **pol); void pol2d_destroyd(Pol2Dd **pol); void Pol2D::destroy(Pol2D **pol);
| pol | El polígono. Será puesto a |
pol2d_transform ()
Aplica una transformación 2D.
void pol2d_transformf(Pol2Df *pol, const T2Df *t2d); void pol2d_transformd(Pol2Dd *pol, const T2Dd *t2d); void Pol2D::transform(Pol2D *pol, const T2D *t2d);
| pol | El polígono. |
| t2d | Transformación 2D. |
Observaciones
El polígono no guarda las coordenadas originales. Sucesivas transformaciones se irán acumulando.
pol2d_points ()
Obtiene los vértices que forman el polígono.
const V2Df* pol2d_pointsf(const Pol2Df *pol); const V2Dd* pol2d_pointsd(const Pol2Dd *pol); const V2D* Pol2D::points(const Pol2D *pol);
| pol | El polígono. |
Retorna
Puntero a un array de vértices.
Observaciones
No modificar el array devuelto. Copiar si fuera necesario.
pol2d_n ()
Obtiene el número de vértices que forman el polígono.
uint32_t pol2d_nf(const Pol2Df *pol); uint32_t pol2d_nd(const Pol2Dd *pol); uint32_t Pol2D::n(const Pol2D *pol);
| pol | El polígono. |
Retorna
El número de vértices.
Observaciones
Es el mismo valor que el utilizado en el constructor pol2d_createf.
pol2d_area ()
Obtiene el área del polígono.
real32_t pol2d_areaf(const Pol2Df *pol); real64_t pol2d_aread(const Pol2Dd *pol); real Pol2D::area(const Pol2D *pol);
| pol | El polígono. |
Retorna
El área.
pol2d_box ()
Obtiene los límites geométricos del polígono.
Box2Df pol2d_boxf(const Pol2Df *pol); Box2Dd pol2d_boxd(const Pol2Dd *pol); Box2D Pol2D::box(const Pol2D *pol);
| pol | El polígono. |
Retorna
Caja alineada con los ejes, definida por los vectores mínimo y máximo.
pol2d_ccw ()
Obtiene el orden del recorrido de los puntos del polígono.
bool_t pol2d_ccwf(const Pol2Df *pol); bool_t pol2d_ccwd(const Pol2Dd *pol); bool_t Pol2D::ccw(const Pol2D *pol);
| pol | El polígono. |
Retorna
TRUE sentido antihorario counter-clockwise. FALSE sentido horario clockwise.
pol2d_convex ()
Obtiene si el polígono es o no convexo.
bool_t pol2d_convexf(const Pol2Df *pol); bool_t pol2d_convexd(const Pol2Dd *pol); bool_t Pol2D::convex(const Pol2D *pol);
| pol | El polígono. |
Retorna
TRUE si es convexo. FALSE si no.
pol2d_centroid ()
Obtiene el centroide (centro de masas) del polígono.
V2Df pol2d_centroidf(const Pol2Df *pol); V2Dd pol2d_centroidd(const Pol2Dd *pol); V2D Pol2D::centroid(const Pol2D *pol);
| pol | El polígono. |
Retorna
El centro de masas.
pol2d_visual_center ()
Obtiene el centro visual o punto de etiquetado.
V2Df pol2d_visual_centerf(const Pol2Df *pol); V2Dd pol2d_visual_centerd(const Pol2Dd *pol); V2D Pol2D::visual_center(const Pol2D *pol);
| pol | El polígono. |
Retorna
El centro de etiquetado.
Observaciones
Corresponde a un punto dentro del polígono situado a una distancia máxima de cualquier borde. En polígonos convexos coincidirá con el centroide. Implementa una adaptación del algoritmo polylabel del proyecto MapBox.
pol2d_triangles ()
Obtiene una lista de triángulos que forman el polígono.
ArrSt(Tri2Df)* pol2d_trianglesf(const Pol2Df *pol); ArrSt(Tri2Df)* pol2d_trianglesd(const Pol2Dd *pol); ArrSt(Tri2Df)* Pol2D::triangles(const Pol2D *pol);
| pol | El polígono. |
Retorna
Array de triángulos. Debe ser destruido con arrst_destroy(&triangles, NULL, Tri2Df).
Observaciones
La unión de todos los triángulos corresponde con el polígono original.
pol2d_convex_partition ()
Obtiene una lista de los polígonos convexos que forman el polígono.
ArrSt(Pol2Df)* pol2d_convex_partitionf(const Pol2Df *pol); ArrSt(Pol2Df)* pol2d_convex_partitiond(const Pol2Dd *pol); ArrSt(Pol2Df)* Pol2D::convex_partition(const Pol2D *pol);
| pol | El polígono. |
Retorna
Array de polígonos convexos. Debe ser destruido con arrst_destroy(&polys, pol2d_destroyf, Pol2Df).
Observaciones
La unión de todos los polígonos corresponde con el polígono original.