


2D Circles
This page has been automatically translated using the Google Translate API services. We are working on improving texts. Thank you for your understanding and patience.
Functions
| Cir2D | cir2d (...) |
| Cir2D | cir2d_from_box (...) |
| Cir2D | cir2d_from_points (...) |
| Cir2D | cir2d_minimum (...) |
| real | cir2d_area (...) |
| bool_t | cir2d_is_null (...) |
Types and Constants
| Cir2D | kNULL |
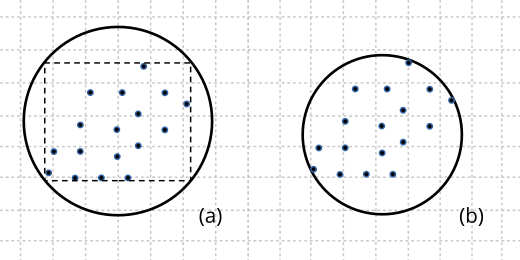
Circles allow us to group a set of points within the same container volume. Collision detection will be performed optimally since it is the geometric test that requires the fewest operations. Given a set of points, we can calculate the container circle in various ways (Figure 1) depending on the precision and speed needed.
- Use cir2d_from_boxf to get the circle from a 2D box.
- Use cir2d_minimumf to obtain the circle of minimum radius from a set of points.
- Use cir2d_from_pointsf to obtain the circle from the the set average. More balanced option in terms of precision/performance.
kNULL
const Cir2Df kCIR2D_NULLf; const Cir2Dd kCIR2D_NULLd; const Cir2D Cir2D::kNULL;
Represents a null circle (no geometry).
cir2d ()
Create a 2d circle from its components.
Cir2Df cir2df(const real32_t x, const real32_t y, const real32_t r); Cir2Dd cir2dd(const real64_t x, const real64_t y, const real64_t r); Cir2D Cir2D(const real x, const real y, const real r);
| x | Center x coordinate. |
| y | Center y coordinate. |
| r | Radius. |
Return
The 2d circle.
cir2d_from_box ()
Create a circle containing a 2D box.
Cir2Df cir2d_from_boxf(const B2D *box); Cir2Dd cir2d_from_boxd(const B2D *box); Cir2D Cir2D::from_box(const B2D *box);
| box | The box. |
Return
The circle.
cir2d_from_points ()
Create a circle containing a set of points.
Cir2Df cir2d_from_pointsf(const V2Df *p, const uint32_t n); Cir2Dd cir2d_from_pointsd(const V2Dd *p, const uint32_t n); Cir2D Cir2D::from_points(const V2D *p, const uint32_t n);
| p | The points vector. |
| n | The number of points. |
Return
The circle.
Remarks
The center will be the midpoint of the set. The radius will be the distance to the farthest point from that center. Provides a good fit with linear cost.
cir2d_minimum ()
Calculate the circle of minimum radius that contains a set of points.
Cir2Df cir2d_minimumf(const V2Df *p, const uint32_t n); Cir2Dd cir2d_minimumd(const V2Dd *p, const uint32_t n); Cir2D Cir2D::minimum(const V2D *p, const uint32_t n);
| p | The points vector. |
| n | The number of points. |
Return
The circle.
Remarks
Provides optimal adjustment in linear time. However, it is slower than cir2d_from_pointsf.
cir2d_area ()
Gets the area of the circle.
real32_t cir2d_areaf(const Cir2Df *cir); real64_t cir2d_aread(const Cir2Dd *cir); real Cir2D::area(const Cir2D *cir);
| cir | The circle. |
Return
The area (πr²).
cir2d_is_null ()
Check if a circle is null (dimensionless).
bool_t cir2d_is_nullf(const Cir2Df *cir); bool_t cir2d_is_nulld(const Cir2Dd *cir); bool_t Cir2D::is_null(const Cir2D *cir);
| cir | The circle. |
Return
TRUE if it is null, FALSE if it contains any point.
Remarks
A single point is a valid circle with radius = 0.